基于ARM的船舶系泊监测系统设计与实现
2012/8/22 15:22:00 仪器仪表学报 关键字:ARM,监测系统 浏览量:
导读:舶自动化产业已成为当今世界主要海洋强国的支柱产业之一。国外自20世纪70年代起,由于海洋事业和国际贸易迅速发展需要,在船舶自动化技术及新设备研制方面出现了蓬勃发展形势,通过几十年的持续发展,奠定了坚实的基础,当今世界在船舶自动化方面正在进行着根本性的变革,船舶自动化的理想已成为现实。
4 采集模块CAN总线的实现
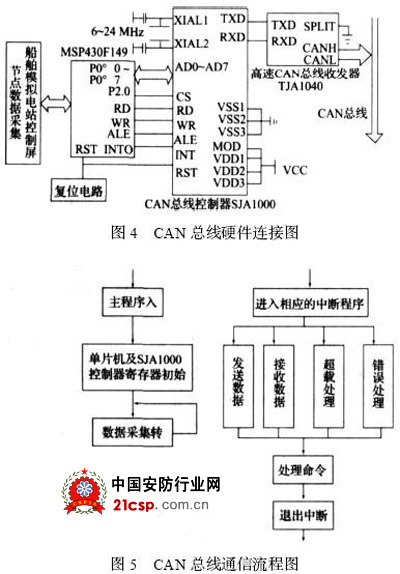
系统中的采集模块共分为5 个,分别是:潮位,波浪观测;船舶运动姿态观测;船舶移动量观测;缆绳拉力观测;护弦变形观测。每个模块接各自的传感器采集数据,然后将采集的数据经A/ D 转换后通过CAN总线送入嵌入式设备. 系统中采用飞利浦公司的SJ 1000 作为CAN 总线控制器,并采用TJA1040 作为CAN 总线收发器,整个系统的硬件电路连接如图4 所示[4 ] 。
采集模块为了保证CAN 总线上通讯的实时性,CAN 通讯采用中断方式,其通信流程如图5 所示。
5 结 论
以S3C2410 为核心的嵌入式硬件系统,定制并移植Windows CE 作为操作系统的系统平台,CAN 总线方式实现通信,实现了船舶系泊监测的自动化,而且为用户提供了一个友好的界面,操作方便,大大减少了工作人员的工作强度。总之整个系统积控制、测量、通信等自动化功能于一身,满足了船舶自动化的要求,有广泛的应用前景和价值。